
Ce qu’il faut retenir avant de s’équiper ou de s’y fier en navigation
- Le sonar latéral sert à explorer le fond sur les côtés du bateau, pas seulement sous la coque.
- Son intérêt principal est la détection d’obstacles, de ruptures de relief et de zones utiles pour passer ou mouiller.
- Une fréquence élevée donne plus de détail, mais une portée utile plus courte.
- La qualité d’image dépend autant de la vitesse, de l’implantation de la sonde et du réglage de portée que de l’appareil lui-même.
- Je le considère comme un outil d’aide à la décision, jamais comme un substitut à la carte, au balisage et à l’observation visuelle.
Comment l’imagerie latérale dessine le fond
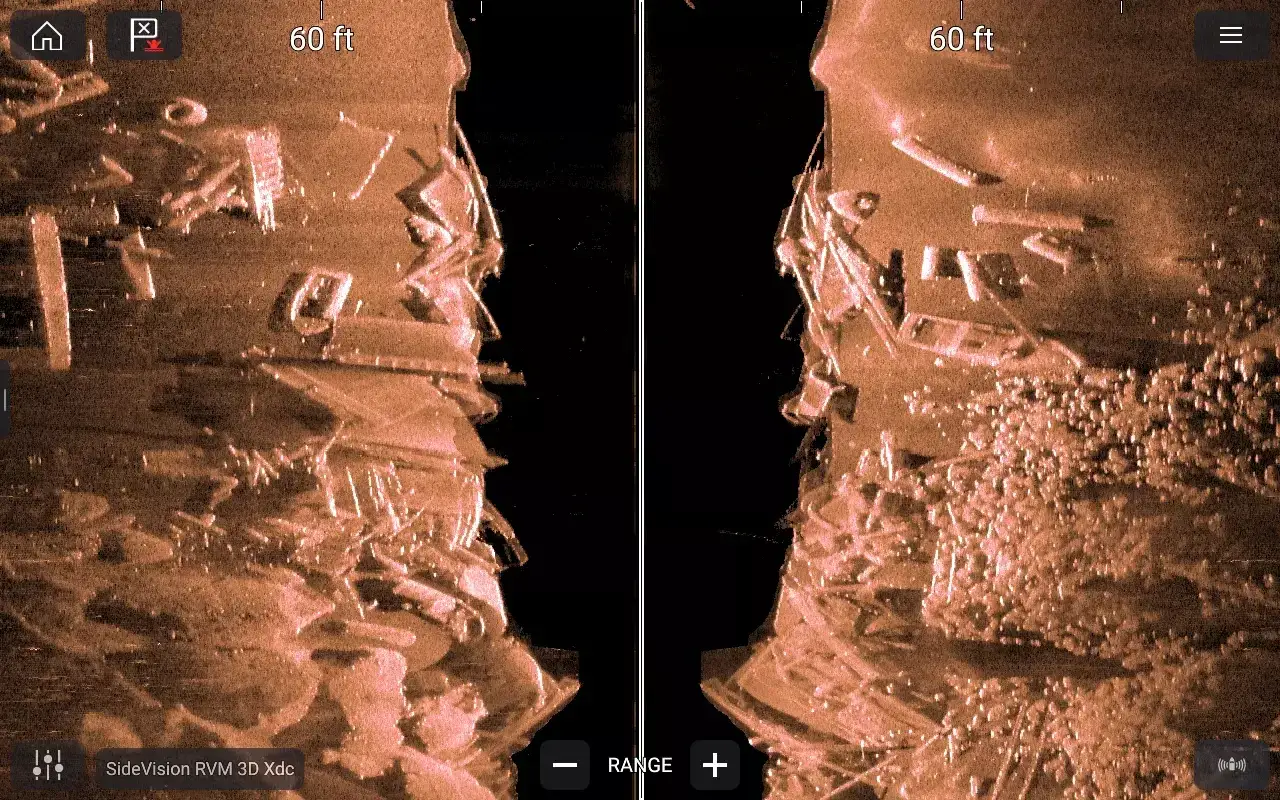
Le principe est simple sur le papier, mais très efficace en mer comme en eau intérieure: une sonde émet des impulsions sonores de chaque côté du bateau, puis mesure les échos renvoyés par le fond et les objets immergés. L’écran ne montre donc pas une photo au sens strict, mais une image acoustique construite à partir des retours sonores, avec des zones claires, sombres et des ombres qui racontent la hauteur des objets.
Ce qui compte ici, c’est le compromis entre portée et finesse. Les systèmes modernes travaillent souvent autour de 455 kHz et 800 kHz; certains modèles UHD montent jusqu’à 1,2 MHz pour gagner en précision. Plus la fréquence est élevée, plus le détail est fin, mais plus la portée utile se réduit. Je pense toujours à ce type de sonar comme à une lampe que l’on balaie sur le fond: on éclaire large avec moins de précision, ou plus serré avec une lecture plus nette.
- Écho très clair sur une zone dure: roche, cailloutis, épave métallique ou structure compacte.
- Retour plus homogène sur du sable ou de la vase: le fond est lisse, les contrastes sont plus faibles.
- Ombre acoustique derrière un objet: elle donne souvent plus d’indices que le point clair lui-même.
En pratique, cette image est utile parce qu’elle fait apparaître ce qu’un sondeur classique ne montre pas de manière aussi large. Reste à voir pourquoi elle complète, plutôt qu’elle ne remplace, les autres vues de l’électronique de bord.
Pourquoi il ne remplace pas le sondeur classique
J’observe souvent la même erreur chez les plaisanciers: croire qu’une seule vue suffit à tout faire. Ce n’est pas le cas. L’imagerie latérale, le sondeur 2D et l’imagerie verticale n’ont pas le même rôle. Le premier sert surtout à chercher, le second à mesurer sous la coque, et le troisième à lire ce qui est juste sous la route du bateau.
| Technologie | Ce qu’elle montre | Intérêt en navigation | Limite principale |
|---|---|---|---|
| Sonde 2D classique | La profondeur sous le bateau et la structure directement dessous | Suivre un chenal, vérifier un haut-fond sous l’axe de navigation | Vue très étroite, peu d’information sur les côtés |
| Imagerie verticale | Le relief et les détails sous la coque avec davantage de netteté | Lire une cassure, un herbier, un empilement de roches | Pas de vision latérale, donc peu utile pour explorer large |
| Imagerie latérale | Les deux bords du bateau, les objets et les ruptures de terrain à distance | Repérer un danger, une bordure de banc, une épave, une entrée de mouillage | Lecture plus délicate si la vitesse, la portée ou la pose de la sonde sont mauvaises |
Je combine toujours les trois quand le bord est un peu sérieux: la vue latérale pour détecter, la vue verticale pour confirmer, et la carte pour recouper. Une fois cette hiérarchie comprise, le vrai sujet devient la lecture de l’écran, car c’est là que les erreurs commencent.
Lire l’image sans se tromper
Le point le plus piégeux, c’est la tendance à regarder uniquement les taches claires. En réalité, l’ombre acoustique raconte souvent plus que l’écho lui-même, parce qu’elle indique la hauteur de l’objet par rapport au fond. Un rocher bas produit une petite ombre; une épave, une motte de roche ou un pieu haut laisse une ombre plus longue et plus nette.
Il faut aussi garder en tête l’orientation. L’écran est séparé en deux moitiés: bâbord et tribord. Si l’image n’est pas bien configurée, on peut vite inverser les côtés et croire qu’un danger se trouve à gauche alors qu’il est à droite. Je vérifie cela systématiquement avant d’entrer dans une zone serrée, surtout si je travaille avec un écran partagé et une carte en parallèle.
- Objet haut + ombre longue: structure isolée, roche, épave ou obstacle bien marqué.
- Retour clair sans ombre nette: objet plat, fond dur, transition de texture.
- Traînée régulière et continue: souvent une bordure de banc, une pente de fond ou une limite de végétation.
- Image étirée ou floue: vitesse excessive, portée trop large ou défilement mal réglé.
Je conseille de s’entraîner sur des zones connues: un port, un quai, une plage peu profonde, puis un secteur déjà balisé. Une fois le cerveau habitué aux signatures acoustiques, on lit l’image beaucoup plus vite. L’étape suivante consiste donc à régler la machine pour qu’elle produise une image exploitable, pas seulement jolie.
Les réglages qui changent vraiment la qualité
Sur ce type de sonar, les réglages ont un impact énorme. La bonne nouvelle, c’est qu’il n’en faut pas quinze. La mauvaise, c’est qu’un seul mauvais choix peut dégrader tout le rendu. Les paramètres qui comptent le plus sont la fréquence, la portée latérale, le défilement de l’écran, la vitesse du bateau et l’implantation de la sonde.
| Réglage | Effet principal | Mon conseil terrain |
|---|---|---|
| 455 kHz | Portée plus large, détails plus modestes | Utile pour explorer un secteur inconnu ou couvrir vite une zone large |
| 800 kHz | Image plus fine, portée plus courte | À privilégier quand le relief est déjà à peu près connu et que je veux lire les petits détails |
| 1,2 MHz UHD | Très haute définition, portée encore plus limitée | Excellent pour les zones peu profondes et les lectures précises à courte distance |
| Défilement Auto | Adapte l’affichage à la vitesse du bateau | Souvent le réglage le plus propre pour éviter les proportions faussées |
| Portée latérale | Largeur de l’eau explorée de chaque côté | Je commence large, puis je resserre dès que je repère un détail utile |
Sur un passage de lecture propre, je préfère une allure régulière plutôt qu’une vitesse élevée. Dans les relevés méthodiques, 3 à 4 nœuds servent souvent de bon repère; au-delà, l’image peut s’étirer si le réglage n’est pas compensé. Je garde aussi un œil sur les turbulences autour de la sonde: bulles d’air, cavitation et mauvaise hauteur de montage dégradent vite le rendu. Mais même bien réglé, un sonar reste un outil de contexte: il faut encore savoir quand s’en méfier.
Quand il aide vraiment et quand il déçoit
Je trouve l’imagerie latérale particulièrement utile dans les entrées de port, les chenaux mal connus, les estuaires, les lacs intérieurs et les zones côtières où le fond varie rapidement. Elle est moins spectaculaire quand on navigue au large sur un fond uniforme, parce qu’il y a moins de contraste à lire. Ce n’est pas un défaut de la technologie; c’est simplement une question d’usage.
Un point surprend souvent: la turbidité de l’eau gêne beaucoup moins que le mouvement de l’eau. Comme il s’agit d’ondes sonores, une eau un peu trouble n’empêche pas la lecture comme le ferait une caméra. En revanche, une mer hachée, des bulles, un bateau trop rapide ou une sonde mal alignée ruinent la netteté.
| Situation | Intérêt | Limite à garder en tête |
|---|---|---|
| Entrée de port ou chenal | Très élevé | Il faut ralentir et recouper avec le balisage |
| Banc de sable, rochers, épaves | Très élevé | La portée doit rester raisonnable pour conserver du détail |
| Eau très calme et peu profonde | Élevé | Attention à la zone aveugle près de la coque |
| Eau agitée ou très aérée | Moyen à faible | Les bulles et les chocs de coque brouillent la lecture |
| Eau très profonde | Variable | La portée utile et la lisibilité diminuent vite |
En clair, je m’en sers là où il faut décider proprement, pas là où il faudrait se raconter qu’un écran suffit à tout sécuriser. C’est cette discipline qui transforme un affichage séduisant en vraie aide à la navigation.
Les vérifications que je fais avant un passage délicat
Avant de m’engager dans une zone étroite ou peu connue, je fais toujours les mêmes vérifications. Elles paraissent basiques, mais elles évitent les mauvaises surprises. Une lecture propre vaut mieux qu’un écran sophistiqué utilisé trop vite.
- Je recoupe l’image avec la carte marine, les marques de balisage et la logique du chenal.
- Je réduis la vitesse pour stabiliser l’affichage et laisser le temps à l’écran de “dessiner” le fond.
- Je garde une portée assez serrée pour conserver du détail au lieu d’explorer trop large et trop flou.
- Je marque un point GPS si une structure mérite d’être revue ou contournée plus tard.
- Je refais un passage dans l’autre sens quand l’objet ou la cassure me semble ambiguë.
- Je confirme toujours avec le sondeur classique si la profondeur sous la route devient critique.
Dans les zones françaises où les fonds changent vite, entre estuaire, côte sableuse et bassin de mouillage encombré, cette méthode prudente reste la meilleure. L’imagerie latérale apporte une vision beaucoup plus large du fond, mais c’est la combinaison avec la carte, le balisage et le calme du pilote qui fait vraiment la différence.